試作センサの性能や特性を評価するシステムです
概要
コンソーシアム事業において、対人サービス用ロボットの皮膚として利用できるようなセンサ
「超柔軟性接触センサ」(または「ソフトスキンセンサ」)の開発に携わりました。
開発中のセンサの試作品について、その信号出力(電圧)波形を計測・保存し、解析することによって、
試作センサの性能や特性を評価するシステムになりました。
特長
- PCベースの計測システムを採用し、計測結果の電子データ化を行うことによって、計測結果のコンソーシアムメンバーとの共有が容易
- LabVIEWを採用することによって豊富な解析関数群が標準で準備されている為、さまざまな解析によるセンサの評価が可能
- PXI規格を用いたシステムの為、センサ評価方法の変更に柔軟に対応可能
技術的な特徴
- 高性能なADボードを採用したことにより、試作段階の出力が安定しないセンサの出力も確実に計測ができる
- 計測したその場で保存した波形の確認が可能
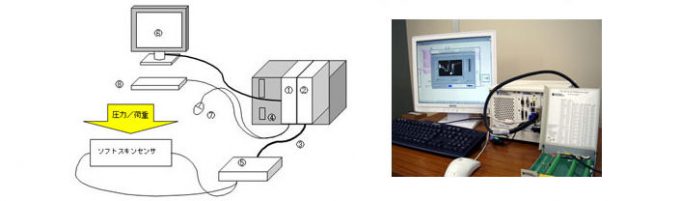
- 改良型システムにおいて、システムにデジタルフォースゲージ(荷重変換機)を追加したことにより、センサに対する入力(荷重)と出力(電圧)を同期して計測・保存が可能になった
用途
- 試作センサの信号出力(電圧波形)の計測と保存によるセンサ性能の確認と評価
- 解析によるセンサ特性の評価など
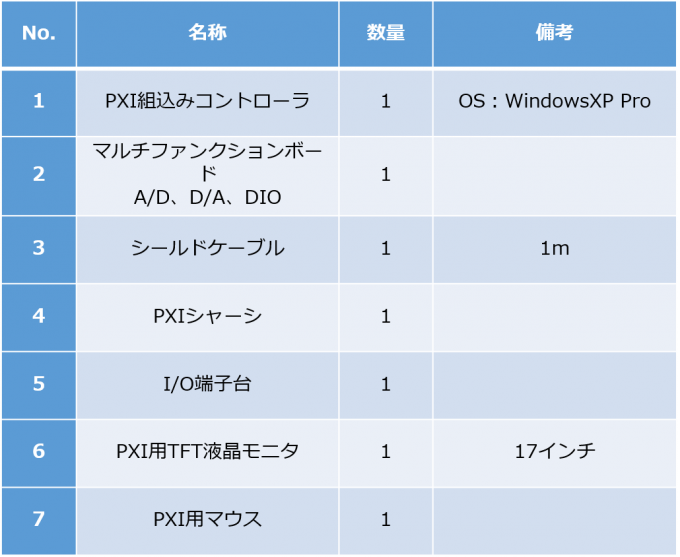
システム構成
※開発当時のシステム構成です。ご依頼の場合は現在の標準で製作いたします。
・開発言語:LabVIEW 8.0